
Уважаемые коллеги автомоделисты, этим материалом хотелось бы начать и, как можно дольше, продолжать общение на темы трассового моделизма. Я с Украины. Начал писать о трассовых в 2003 году. Думал, что буду регулярно, но … Если вас устроит, мой вариант общения – оригинал на украинском языке и отдельные важные, с моей точки зрения, моменты на русском, более детально о причинах возможно немного позже, то я начинаю.
Пульты управления трассовыми автомоделями
Управление трассовой моделью невозможно без пульта, от качества которого не в меньшей степени зависит успех в соревнованиях. Для того чтобы начать проектировать пульт управления, необходимо познакомиться с основными методами управления частотой вращения двигателями постоянного тока с постоянными магнитами. Из всех известных – среди автотрассовиков массово используется только два: путем изменения активного сопротивления в цепи якоря (такие пульты среди моделистов принято называть “механическими”) и попытки регулировать полупроводниковыми приборами напряжение, подводимое к двигателю (“электронные”). В первом случае механическая характеристика двигателя становится мягкой. Это легко заметить по тому, что модель после старта с места сохраняет свою скорость после того, как на пульте курок будет повернут немного назад, или по уменьшению скорости модели если в ее дорожку попадет другая.
“Эра” использования “механических” пультов среди спортсменов высокого уровня подошла к завершению. В то же время, использование их среди “новичков” оправдано не только по материальным затратам. Потому сначала я на них и остановлюсь.
Механические пульты
Среди трассовиков основными принципами управления, положенными в основу современных пультов, оборотами коллекторного двигателя постоянного тока с постоянными магнитами – это путем изменения сопротивления в цепи, их можно грубо назвать “механическими”, и регулирование напряжения, которое подается через пульт, так называемые “электронные”. Это разделение не только условно, так как из средней школы всем известен закон Ома, но и безграмотно. Необходимость деления – наши традиции – если в “ручке” есть транзистор – пульт “электронный”, если обычный нихром, то теперь – “механический”, и не важно что транзистор выполняет ту же роль сопротивления для тока в цепи.
Обычно весь пульт управления разделяют на две части: верхнюю, которую держат в руке (ее называют “ручкой”), и нижнюю, подключаемую к гнездам на трассе (“чок”). В “чоке” располагают основное ограничительное сопротивление (2 – 5 Ом), которым регулируют максимальную скорость модели. Это сопротивление должно быть регулируемым и иметь достаточную мощность рассеивания тепла, выбираемую исходя из используемого двигателя (например: если нужно сбросить 10 вольт при потребляемом токе в 5 А, то необходимо иметь мощность сопротивления не менее 50 Вт). Если воспользоваться “заводским” не удалось, то возможно изготовить самостоятельно. Для этого используют нихромовую проволоку диаметром 1-1,5 мм, которую наматывают на соответствующую электроизоляционную теплостойкую поверхность. Такой может быть: керамика, дюралюминий изолированный слюдой или, лучше всего на взгляд автора, на анодированную поверхность дюралюминия (о “секретах” электроизоляционного анодирования алюминия в “домашних условиях” автор планирует посвятить отдельную статью). Подвижный контакт может быть изготовлен из пружинной латуни, важно только чтобы он обеспечивал надежный контакт и ручка для регулировки была теплоизоляционной.
Основная проблема, которую приходилось решать при изготовлении ручки – это выбор материалов на подвижный контакт. В первых своих конструкциях автор использовал движение латунной пластинки непосредственно по нихромовой проволоке, что приводило к “прикипанию” контактирующих поверхностей. Замена латуни на вольфрамовый контакт к положительному результату не привела. Другие трасовики использовали меднографитные пары (в качестве подвижной даже остатки дорогих щеток от двигателей), но не смогли избавиться от достаточно жестких пружин, возвращающих курок в исходное состояние. Основная ошибка при выборе этой пары заключалась в том, что все пытались добиться наибольшей проводимости на переходной поверхности, забывая, что переключать приходилось опоры. Учитывая это, была найдена оптимальная пара: неподвижные контакты с меди и подвижный – графитовый (без примесей меди: графитовый стержень от гальванической батарейки питания, угольные щетки от высоковольтных (220 вольт и более) приводов). Хотя это привело к большему переходному сопротивлению и, как следствие, повышенному тепловыделению, зато практически полностью устранило проблему “прикипания” курка. Неподвижные контакты набираются из медной изолированной проволоки диаметром 1-1,5 мм П – подобной формы на электроизоляционное основание “ручки” в предварительно просверлении отверстия. После чего загибаются в шахматном порядке из тыловой части. К их верхним частям подпаивают провода, идущие к основному сопротивлению. Лицевой части придают форму плоского контакта с помощью напильника, доводя поверхность до “зеркальной”. Количество контактов определяется выбранным набором скоростей. Для ликвидации переходного сопротивления графитового контакта при полностью нажатом курке параллельно включают медную контактную группу на замыкание, использованную из мощных промышленных выключателей.
Устройство механического пульта сложностей не вызывает, кроме основной, которая связана с неправильным принципиальным подходом. Суть в том, что у нас в Украине в тех “ручках”, которые в свое время использовали чемпионы, основной проблемой было “прикипание” контактной пары, поэтому возвратные пружины были покрепче, колечки на курках для дополнительного возврата, индивидуальный подбор скользящей пары и т.д. На мой “механический” пульт никто и смотреть не хотел – сын выигрывал на моделях, где была разрешена только Parma. Сейчас возможно и поверили бы, но мода на “электронные”. Основное в механике – это скользящий контакт из графита , “мягкого” – без меди, и меди, в качестве неподвижных контактов. Чистый графит к меди не “прикипает”, это во-первых. Во-вторых, зачем добиваться проводимости там, где она не нужна, и количество тепла, которое выделяется на этой паре – не критично. На рис. (мал.) 1 принципиальная схема с использованием светодиода.
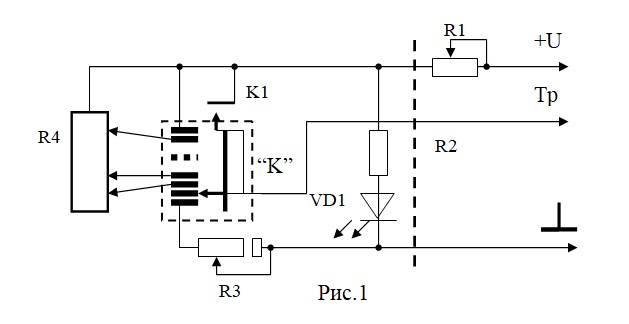
Практическое выполнение пульта особого труда не вызывает. Единственное, что хотелось бы рекомендовать, дополнить светодиодом по приведенной схеме (рис.1). Он поможет определить: 1). Правильность подключения пульта. Светодиод “горит” при правильном подключении, но обязательно при снятой модели с трассы. 2). Наличие напряжения на трассе. 3). По его “поведению” при нажатии на курок можно судить об отсутствии контакта модели с шиной, или о коротком замыкании.
Электронные пульты
Сейчас трасcовики пользуются пультами, в которых полупроводниковый транзистор выполняет регулирующую функцию. Одна из возможных схем приведена на рис.2.
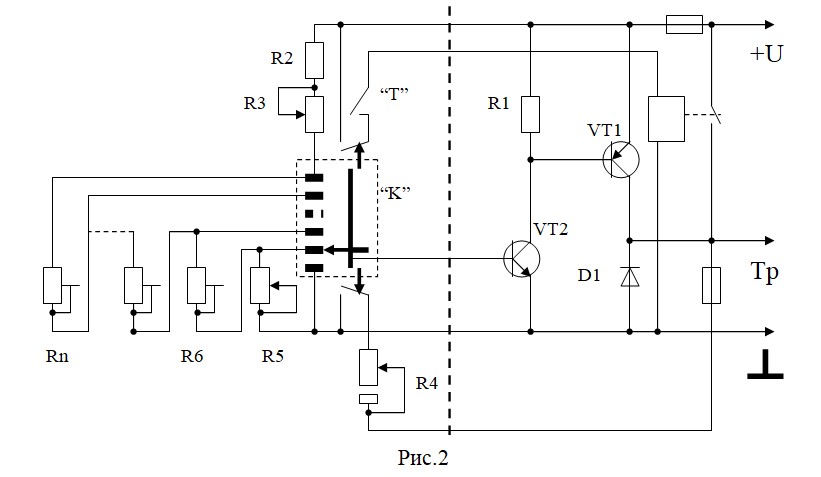
В качестве VT1 используют мощный транзистор (например, ГТ806 с максимальным током коллектора 20 А, или ГТ813 – 30 А). Автор не рекомендует использовать параллельное соединение силовых приборов. Желательно подыскать нужный по максимальному току коллектора. VT2 – КТ817 или аналогичный. Важно, чтобы он мог “раскатать” следующий каскад. Если есть желание еще больше снизить ток на ламельках курка, то нужно добавить еще один каскад (например на КТ315). Диод VD1 (типа КД212) требуется для обеспечения работы на индуктивной нагрузке. Сопротивления R3 и R5 регулируют соответственно максимальную и минимальную скорость модели. Сопротивления R6…Rn могут быть заменены на постоянные и подключаться к пульту через многоножный разъем (они носят название у трасовиков – “катриджи”). Назначение этих сопротивлений – определение величины изменения напряжения между ламельками курка. R4 – регулятор “тормоза”. Силовые биполярные тразисторы имеют относительно большое сопротивление в насыщенном состоянии. Поэтому возникает необходимость в использовании дополнительного реле Р, которое может включаться выключателем Т (его название – “турбо”). На силовом транзисторе выделяется наибольшее количество тепла во время работы, поэтому он требует интенсивного охлаждения. Особенно учитывая, что с повышением температуры уменьшаются допустимые рабочие токи. Это является его основным недостатком по отношению к нихромому сопротивлению, не терявшему работоспособности до температур в 1000°С.
Начало в Украине эры “электронных” пультов стандартно – один коллега привез из-за “бугра” – начали копировать. Хорошо что схема была простой. Силовой транзистор, марку, которого тщательно скрывали – любой из доступных, обеспечивающий необходимый ток. Параллельное соединение силовых транзисторов вредно для биполярных. Описывать принцип работы схемы на рис.2 на русском языке не буду – сейчас эта схема не актуальна. Тем более, что у нее больше недостатков, чем достоинств, по сравнению с “механикой” – транзистор работает до 100 градусов нагрева, с ухудшением характеристик, т.е. необходимо принудительное охлаждение, т.к. количество тепла выделяется не меньше чем при нихроме, для которого и 1000 не предел. Замечу сразу, что совсем недавно “нарвался” на рекомендацию изготовлять дополнительные сопротивления из милиметрового медного провода путем намотки на немагнитный материал – зачем использовать хороший проводник для изготовления сопротивления? Дефицит нихрома на рынках – спиралей к утюгам нет? Но “электроника” вошла в “моду”.
НЕ все Украинцы занимались “тупым” копированием “забугорной” техники. Но они долгое время скрывали принципы своих разработок.
Я долгое время не обращал внимание на “электронную крутизну” не до того было, тем более, что курок не “прикипал”, а других достоинств у “электроники” не было – “круто”, когда кулер с компьютера жужжит.
Следующий этап – это заставить силовой ключ работать в импульсном режиме (включен – выключен). Это позволяет уменьшить количество тепла, выделяемого на силовом транзисторе, так как он либо полностью включен и на нем падает минимальная мощность, либо выключен, то есть электрический ток в цепи отсутствует. Кроме этого, такой режим работы позволяет перейти к настоящим преимуществам электронных пультов – это регулировка напряжения. Основной принцип такой регулировки легко понять из рис.3.
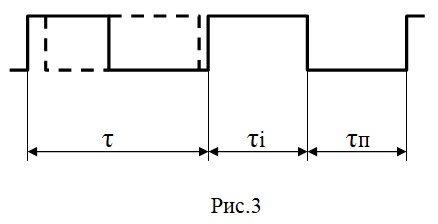
На нем Т – обозначен период повтора импульсов, Тi – длину импульса, а Тп – паузу. Изменяя эти величины, регулируют среднее значение напряжения. Одна из возможных принципиальных схем такого регулятора приведена на рис.4. В качестве DD1 можно выбрать цифровую микросхему 555 серии АГ3. Длина импульса регулируется изменением величины сопротивления R2 объемности С2, а паузы – R3 и C3. Выключатель К1 необходим для срыва колебательного процесса в нулевом положении курка. Микросхема DD2 – обычный стабилизатор напряжения в 5 вольт.
Не то, что бы “достали”. В 2001 первый раз съездил с сыном в Прибалтику на их этап. С этого момента началась работа над не новым в электротехнике методом регулирования – широтно-импульсным (рис.3 и 4). Схема на рис.3 – это принцип в принципиальной схеме на цифровой микросхеме серии 555АГ3. Длительность импульса регулируют изменением величины сопротивления R2 или C2, а паузы – R3 и С3. Выключатель необходим для срыва колебательного процесса в нулевом положении курка.
После изготовления нескольких пробных вариантов, создал три экземпляра для детальной эксплуатационной проверки.
Дальнейшее усовершенствование пультов возможно с использованием полевых транзисторов. Блок-схема изготовленного автором пульта приведена в дополнении. В нем процессор собран на 30 цифровых микросхемах малой и средней степени интеграции, постоянная память объемом 512 Кбит, силовой транзистор типа IRF3205 (максимальный импульсный ток в 390 А, сопротивление переходу при токе в 110 А – 0,008 Ома (сопротивление 1) медной проволоки диаметром 1,6 мм – 0,009 Ом)). “Тормоз” тоже на полевом транзисторе работает в импульсном режиме. Будущее, но не столь далекое по мнению автора, в замене большого количества цифровых микросхем на программируемые универсальные микропроцессоры, что позволит упростить схемотехнические решения, снизить стоимость изготовления и сделать его более доступным для широкой публики моделистов. Но и это еще не совсем будущее, потому что у автора уже есть определенные разработки. В перспективе разработка специализированного процессора (микросхемы и технологии для его изготовления существуют в Украине), что позволит радикально изменить подход не только в разработке пультов, но и в принципах управления трассовой моделью. Заменить профессионального гонщика такой пульт не сможет, но самостоятельно вести модель по трассе на достаточно высоком уровне ему будет под силу.
Электронный цифровой пульт управления трасовыми моделями “Pashko”
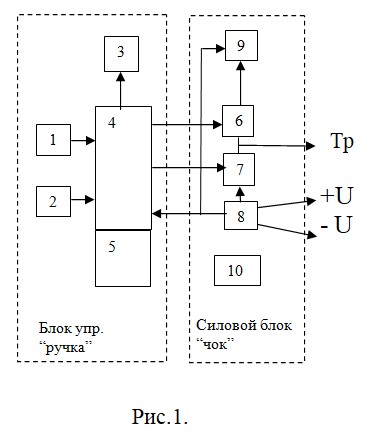
Блок-схема пульта (рис.1):
- Курок (16 “скоростей” и “тормоз”).
- Кнопки выбора режимов работы (4 режима по 16 положений в каждом):
- Vmin – минимальное напряжение первого положения курка (независимая);
- Vmax – максимальное напряжение последнего положения курка (независимая);2.3.Uтр – изменение напряжения (пропорционально сдвигает характеристику независимыхрежимов работы);
- Регулятор электронного “тормоза” от выключеного до полностью включеного (всего 16 положений).
- Индикатор режиму.
- Микропроцессор.
- Постоянная память.
- Регулятор “газа”.
- Регулятор “тормоза”.
- Блок питания.
- Индикатор работы.
- Куллер.
Временная диаграмма работы (рис.2):
- Т – период силовых импульсов пульта равный 50 мкс.
- Тдв. – время одного оборота двигателя (при 120 тыс.об/мин – Тдв. = 500 мкс. или 10 импульсов за оборот, тоесть не менее 3 на одну ламель).
Диаграмма режимов регулирования (рис.3).
Минимальный шаг регулирования 1/256 напряжения на трассе (например, при напряжении на трассе 12 вольт – min шаг регулирования 12/256 = 0,05 вольта)
Технические характеристики пульта:
- Курок с регулируемым ходом от 15 до 7 мм и переменной жесткостью.
- Микропроцессор выполнен на дискретных цифровых микросхемах малой и средней степени интеграции серии 74 и CD40000 и их аналогов.
- Постоянная память объёмом – 512 Кбит.
- Регулятор “газу” выполнен на IRF3205 (max напряжение – 55 В, постоянный ток – 110 А, импульсный – 390 А, сопротивление перехода – 0,008 Ом (Сопротивление 1 метра медного провода диаметром 1,6 мм – 0,009 Ом) при токе в 110 А, температура от –55 до 175˚С.
- Регулятор “тормоза” аналогичен “газу” только с max током – 50 А.
Режимы работы пульта:
- Постоянное напряжение на трассе – от 12 до 20 вольт (в режиме с зарядкой аккумуляторов и без).
- Напряжение работоспособности пульта (без гарантии режимов работы) – от 6 до 25 вольт.
- Температура эксплуатации – от 10 до 50˚С (хранения – от –25 до 70˚С).
Гарантия – 3 года. Гарантия не распространяется на пульт с механическими повреждениями, при использовании переменного и пульсирующего напряжения, или более 25 вольт.

Автор: Ігор Янішевський, Рівне, Україна, 26 апреля 2005 года
Перевёл и отредактировал: Андрей Колегов
Скачать оригинальный документ DOC
Прим.ред: В документе отсутствует Рис.4. Если рисунок найдётся, то просим прислать в редакцию, исправим статью.